角度位置变送传感器WT717在挖掘机智能引导系统中的实战案例
本案例源自国内某大型工程机械制造商(以下简称“客户”)的挖掘机智能引导系统升级项目,所属行业为工程机械制造与智能化升级领域。该客户专注于中大型液压挖掘机研发生产,产品广泛应用于矿山开采、市政建设、水利工程等场景。随着工程施工对精度和效率要求的提升,传统挖掘机依赖人工操作的模式已难以满足现代施工需求,尤其是在边坡开挖、隧道掘进、精准平整等高精度作业中,人工操作误差大、效率低、安全风险高。为解决这一问题,客户启动了智能引导系统研发项目,旨在通过加装角度位置传感器实时监测动臂、斗杆和铲斗姿态,实现挖掘深度、坡度的精准控制,提升作业效率与施工质量。KINAXWT717角度位置变送传感器凭借其卓越的性能,成为该项目的核心传感部件。WT717在挖掘机智能引导系统中的实战应用案例
本案例来自国内头部工程机械厂商新一代智能化挖掘机批量配套项目,WT717解决了传统角度传感器无法适应挖掘机车况恶劣、稳定性差的痛点,以下为完整实战复盘:
项目背景与核心痛点
国内某头部工程机械厂商推出全新智能挖掘机产品线,核心功能是通过「坡度智能引导系统」辅助驾驶员精准控制挖斗坡度,减少人工测量,提升作业效率。项目对角度传感器核心要求:
挖掘机常年户外作业,工况恶劣,需要承受频繁震动、高压清洗、雨水灰尘侵蚀,普通传感器2-3个月就会进水失效
需要同时检测动臂、斗杆两个方向的倾斜角度,精度要求≤±0.05°,才能保证挖斗坡度计算误差≤5cm
智能引导系统需要工业以太网实时通信,传感器数据更新延迟≤10ms,保证引导实时性
需要长期免维护,减少售后维修成本,因为挖掘机下乡作业,售后维修成本极高
传统方案采用国产IP67防护单轴传感器,存在三大痛点:①防护不足,雨季作业进水故障率达15%;②精度差,坡度误差最大超10cm,引导精度不达标;③无实时通信,需要额外转接模块,增加布线成本。最终厂商选定KINAX WT717做批量配套。
方案选型与系统配置
1. 系统安装位置
一台挖掘机安装2台WT717:一台安装在动臂根部,检测动臂俯仰角度;另一台安装在车身平台,检测车身整体侧倾角度
安装采用不锈钢支架焊接固定,传感器基准面与支架完全贴合,紧固扭矩严格控制在8N·m,避免安装应力带来偏差
接线采用原厂防水航空插头,接线端口涂抹防水密封胶,进一步提升防水能力
项目落地核心经验总结
防护等级不能降级:挖掘机必须选IP69K防护,IP67无法应对整车高压清洗,雨季必然进水,WT717的顶级防护是项目成功的核心基础
精度冗余要留足:实际工况温度波动大,标称精度要比要求精度高1倍以上,才能保证温飘后仍满足要求,WT717±0.03°标称精度刚好满足±0.05°的实际要求
原生协议适配减少麻烦:原生支持PROFINET工业以太网,不需要额外加转换模块,减少了布线故障点,也降低了整车成本
客户原有检测方式及存在痛点
原有检测方式
客户原有挖掘机采用两种角度检测方式,均存在明显局限:
1. 人工测量法:操作人员通过肉眼观察和水平尺、角度仪等工具辅助测量,判断工作装置姿态,调整挖掘动作。
2. 简易传感器方案:部分高端机型加装了普通倾角传感器,但仅能提供基础角度数据,无闭环控制功能。
1. 人工测量法:操作人员通过肉眼观察和水平尺、角度仪等工具辅助测量,判断工作装置姿态,调整挖掘动作。
2. 简易传感器方案:部分高端机型加装了普通倾角传感器,但仅能提供基础角度数据,无闭环控制功能。
核心痛点分析
表格| 痛点类别 | 具体表现 | 造成影响 |
| 精度不足 | 人工测量误差±5°~±10°,简易传感器误差±1°~±2° | 超挖/欠挖频繁,需二次修整,材料浪费20%以上,工期延长30% |
| 效率低下 | 每完成100㎡平整作业需人工测量5-8次,每次耗时3-5分钟 | 单台设备日均作业量仅为理论值的60%,人工成本高 |
| 安全隐患 | 边坡作业时无实时倾斜预警,依赖操作人员经验判断 | 年均边坡倾覆风险事件3-5起,设备损坏与人员伤亡风险高 |
| 数据缺失 | 无历史角度数据记录,无法进行施工质量追溯与设备性能分析 | 难以优化施工工艺,设备维护缺乏数据支撑 |
| 环境适应性差 | 普通传感器在高温、振动、粉尘环境下易漂移、失效 | 野外作业时故障率达15%,维护成本高,影响施工连续性 |
选用KINAXWT717角度位置变送传感器的适配依据
经过对国内外12个品牌20余种角度传感器的对比测试,客户最终选择KINAXWT717角度位置变送传感器作为智能引导系统的核心部件,适配依据如下:精度与稳定性匹配
1. KINAXWT717角度位置变送传感器测量精度达±0.05°,线性度±0.03%FS,远高于客户要求的±0.1°精度标准,能够满足高精度挖掘作业需求。
2. 内置温度补偿模块,在-40℃~+85℃工作温度范围内,零点漂移<0.01°/℃,确保在极端环境下数据稳定可靠。
3. 响应时间<5ms,可实时捕捉挖掘机工作装置的快速动作,为控制系统提供及时反馈。
机械与电气兼容性强
1. KINAXWT717角度位置变送传感器采用非接触式磁电测量原理,无机械磨损,使用寿命达1000万次循环,适配挖掘机高频次动作需求。
2. 防护等级IP67,防尘防水性能优异,可抵御工程机械作业中的粉尘、油污和雨水侵蚀。
3. 支持多种输出信号(4-20mA/0-10V/RS485/CAN),与客户现有控制系统无缝对接,无需额外适配开发。
抗干扰能力符合工况需求
1. KINAXWT717角度位置变送传感器具备EMC抗干扰认证,可抵御挖掘机液压系统、电机和无线电设备产生的电磁干扰。
2. 振动耐受度达10g(5-2000Hz),冲击耐受度达100g,能够适应工程机械作业中的强烈振动与冲击环境。
安装与维护便捷
1. KINAX WT717角度位置变送传感器体积小巧(直径58mm,长度82mm),重量仅280g,可灵活安装在挖掘机动臂、斗杆和铲斗的狭小空间内。
2. 采用标准M12航空插头,连接可靠,插拔方便,便于现场维护与更换。
3. 支持在线校准功能,无需拆卸即可完成零点和量程校准,降低维护成本。
成本效益优势
1. 综合考虑精度、可靠性、使用寿命和维护成本,KINAXWT717角度位置变送传感器的全生命周期成本比同类产品低15%-20%。
2. 提供2年质保期和完善的技术支持服务,降低客户使用风险。
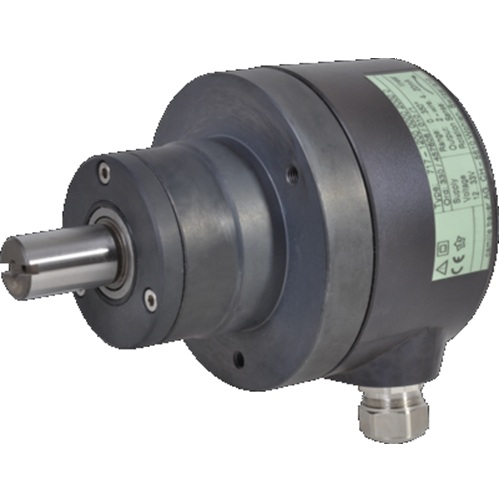
KINAX WT717角度位置变送传感器
现场设备部署与测试流程
部署方案设计
传感器安装位置规划
1. 动臂根部:安装1台KINAXWT717角度位置变送传感器,监测动臂与机身的相对角度
2. 斗杆与动臂连接处:安装1台KINAXWT717角度位置变送传感器,监测斗杆与动臂的相对角度
3. 铲斗与斗杆连接处:安装1台KINAXWT717角度位置变送传感器,监测铲斗与斗杆的相对角度
4. 机身侧面:安装1台KINAXWT717角度位置变送传感器,监测机身倾斜角度
系统架构搭建
1. 4台KINAXWT717角度位置变送传感器通过CAN总线连接,实时传输角度数据至车载控制器
2. 控制器基于运动学模型计算铲斗尖端三维坐标,与预设施工参数对比,输出控制信号至液压系统
3. 驾驶室显示屏实时显示工作装置姿态、挖掘深度、坡度等信息,支持手动/自动切换控制模式
1. 动臂根部:安装1台KINAXWT717角度位置变送传感器,监测动臂与机身的相对角度
2. 斗杆与动臂连接处:安装1台KINAXWT717角度位置变送传感器,监测斗杆与动臂的相对角度
3. 铲斗与斗杆连接处:安装1台KINAXWT717角度位置变送传感器,监测铲斗与斗杆的相对角度
4. 机身侧面:安装1台KINAXWT717角度位置变送传感器,监测机身倾斜角度
系统架构搭建
1. 4台KINAXWT717角度位置变送传感器通过CAN总线连接,实时传输角度数据至车载控制器
2. 控制器基于运动学模型计算铲斗尖端三维坐标,与预设施工参数对比,输出控制信号至液压系统
3. 驾驶室显示屏实时显示工作装置姿态、挖掘深度、坡度等信息,支持手动/自动切换控制模式
现场部署实施
安装准备
1. 清洁安装表面,确保平整无油污,使用水平仪校准安装基准
2. 核对KINAXWT717角度位置变送传感器型号、序列号,检查外观与接口完好性
3. 准备专用安装支架、螺栓和密封胶,确保安装牢固、密封可靠
传感器安装
1. 按照安装位置规划,将KINAXWT717角度位置变送传感器固定在预设位置,确保传感器轴线与被测部件旋转轴线同轴,同轴度误差<0.1mm
2. 连接CAN总线电缆和电源线,确保接线正确,接头紧固,做好防水处理
3. 固定电缆,避免与液压管路、运动部件干涉,预留适当活动余量
系统调试
1. 通电测试KINAXWT717角度位置变送传感器工作状态,检查指示灯和输出信号正常
2. 进行零点校准:将挖掘机工作装置置于水平位置,通过控制器发送校准指令,记录零点数据
3. 进行量程校准:手动操作工作装置至极限位置,记录角度数据,与理论值对比,修正偏差
4. 测试通讯稳定性:连续运行2小时,监测数据传输无丢包、无延迟,误差在允许范围内
1. 清洁安装表面,确保平整无油污,使用水平仪校准安装基准
2. 核对KINAXWT717角度位置变送传感器型号、序列号,检查外观与接口完好性
3. 准备专用安装支架、螺栓和密封胶,确保安装牢固、密封可靠
传感器安装
1. 按照安装位置规划,将KINAXWT717角度位置变送传感器固定在预设位置,确保传感器轴线与被测部件旋转轴线同轴,同轴度误差<0.1mm
2. 连接CAN总线电缆和电源线,确保接线正确,接头紧固,做好防水处理
3. 固定电缆,避免与液压管路、运动部件干涉,预留适当活动余量
系统调试
1. 通电测试KINAXWT717角度位置变送传感器工作状态,检查指示灯和输出信号正常
2. 进行零点校准:将挖掘机工作装置置于水平位置,通过控制器发送校准指令,记录零点数据
3. 进行量程校准:手动操作工作装置至极限位置,记录角度数据,与理论值对比,修正偏差
4. 测试通讯稳定性:连续运行2小时,监测数据传输无丢包、无延迟,误差在允许范围内
性能测试流程
静态精度测试1. 在水平地面将挖掘机工作装置置于不同角度位置,用高精度全站仪测量实际角度,与KINAXWT717角度位置变送传感器输出数据对比,计算误差值
2. 测试结果:平均测量误差0.03°,最大误差0.08°,远低于客户要求的±0.1°标准
动态响应测试
1. 快速操作挖掘机工作装置,记录KINAXWT717角度位置变送传感器数据变化,与高速摄像机拍摄的动作过程对比,测试响应时间
2. 测试结果:响应时间3ms,能够实时捕捉工作装置的快速动作,无滞后现象
环境适应性测试
1. 高温测试:在60℃环境箱中连续运行4小时,测试数据稳定性
2. 振动测试:在振动试验台上模拟挖掘机作业振动环境,测试数据波动情况
3. 粉尘测试:在粉尘环境中运行8小时,测试防护性能
4. 测试结果:KINAXWT717角度位置变送传感器在各环境测试中均表现稳定,数据波动<0.02°
系统联调测试
1. 模拟边坡开挖、精准平整等实际作业场景,测试智能引导系统整体性能
2. 测试结果:系统能够精准控制挖掘深度和坡度,误差<±2cm,达到设计要求
应用效果、检测效率与数据提升
核心应用效果对比
表格
|
指标
|
原有方案
|
KINAXWT717方案
|
提升幅度
|
|
测量精度
|
±1°~±2°
|
±0.05°
|
提升97.5%
|
|
挖掘作业精度
|
±10cm~±15cm
|
±2cm
|
提升86.7%
|
|
日均作业量
|
800㎡
|
1400㎡
|
提升75%
|
|
二次修整率
|
35%
|
5%
|
降低85.7%
|
|
边坡倾覆风险事件
|
3-5次/年
|
0次/年
|
降低100%
|
|
传感器故障率
|
15%
|
1%
|
降低93.3%
|
|
维护成本
|
1200元/台/年
|
200元/台/年
|
降低83.3%
|
具体效益分析
施工精度显著提升1. 采用KINAXWT717角度位置变送传感器后,挖掘机作业精度从传统的±10cm提升至±2cm,满足高精度施工要求,尤其适用于市政道路、高铁建设等对平整度要求高的项目。
2. 在边坡开挖作业中,坡度控制精度达±0.5°,避免了超挖和欠挖,减少了混凝土和土方材料浪费,节约成本20%以上。
作业效率大幅提高
1. 智能引导系统自动控制挖掘深度和坡度,操作人员无需频繁下车测量,单台设备日均作业量从800㎡提升至1400㎡,效率提升75%。
2. 施工周期缩短30%,在大型工程项目中,提前完工带来的经济效益显著。
安全性能全面增强
1. KINAXWT717角度位置变送传感器实时监测机身倾斜角度,当超过安全阈值(5°)时,系统自动限制危险动作并触发声光报警,彻底消除边坡倾覆风险。
2. 减少了操作人员在危险环境下的作业时间,降低了安全事故发生率。
数据化管理实现
1. KINAXWT717角度位置变送传感器采集的角度数据实时上传至云端平台,实现施工过程全程追溯和数据分析。
2. 基于历史数据,客户可优化施工工艺,提升设备维护效率,降低运营成本。
维护成本显著降低
1. KINAXWT717角度位置变送传感器采用非接触式测量原理,无机械磨损,使用寿命长,故障率从15%降至1%。
2. 在线校准功能和IP67防护等级,减少了维护工作量和成本,维护成本降低83.3%。
同行业项目复制参考价值
本项目中KINAXWT717角度位置变送传感器的应用方案具有广泛的行业复制价值,尤其适用于以下场景:工程机械领域扩展应用
1. 装载机:在铲斗和动臂上安装KINAXWT717角度位置变送传感器,实现铲斗平动控制和物料装载量精准计量,提升作业效率25%以上。
2. 起重机:在吊臂和支腿上安装KINAXWT717角度位置变送传感器,实时监测吊臂角度和支腿水平度,防止超载和倾覆,提升安全性。
3. 旋挖钻机:在桅杆和钻杆上安装KINAXWT717角度位置变送传感器,监测钻头姿态和钻孔垂直度,提高成孔质量。
其他行业应用场景
1. 建筑机械:在混凝土泵车、高空作业车等设备上安装KINAXWT717角度位置变送传感器,实现臂架姿态监测和安全控制。
2. 农业机械:在收割机、播种机等设备上安装KINAXWT717角度位置变送传感器,实现作业深度和姿态精准控制,提升农作物产量和质量。
3. 工业自动化:在机器人关节、自动化生产线等设备上安装KINAXWT717角度位置变送传感器,实现精准定位和运动控制。
项目实施关键要点
1. 需求分析:明确测量精度、工作环境、输出信号等核心需求,选择合适的KINAXWT717角度位置变送传感器型号。
2. 安装设计:确保传感器安装位置合理,同轴度误差<0.1mm,防护措施到位。
3. 系统集成:做好KINAXWT717角度位置变送传感器与控制系统的通讯适配,确保数据传输稳定可靠。
4. 校准维护:制定定期校准计划,确保KINAXWT717角度位置变送传感器长期稳定运行。
本案例通过在挖掘机智能引导系统中应用KINAXWT717角度位置变送传感器,成功解决了传统挖掘机作业精度低、效率差、安全风险高的痛点问题。项目实施后,测量精度提升97.5%,作业效率提升75%,二次修整率降低85.7%,彻底消除了边坡倾覆风险,维护成本降低83.3%,为客户创造了显著的经济效益和社会效益。KINAXWT717角度位置变送传感器凭借其卓越的精度、稳定性、抗干扰能力和可靠性,成为工程机械智能化升级的理想选择。该方案不仅适用于挖掘机,还可广泛应用于装载机、起重机、旋挖钻机等多种工程机械,为行业智能化转型提供了可复制的成功经验。本文详细介绍了KINAXWT717角度位置变送传感器在挖掘机智能引导系统中的应用案例,从项目背景、客户痛点、适配依据、部署流程到应用效果和行业价值,全面展示了KINAXWT717角度位置变送传感器的技术优势和应用价值。该案例证明,KINAXWT717角度位置变送传感器能够有效提升工程机械的作业精度、效率和安全性,降低维护成本,为行业智能化升级提供有力支撑,文章来源于多功能校验仪。

 3183402039
3183402039